NJAV Project is a Success thanks to Student-Alumni Collaboration
The NJAV project is a senior engineering project that began in 2004 at TCNJ, in which a team of engineering students creates an autonomous vehicle to compete in the annual Intelligent Ground Vehicle Competition (IGVC). Rather than starting from scratch each year, TCNJ engineering students improve upon the previous team’s vehicle.
Many alumni of the College have left behind legacies, championships—even trees in the Alumni Groove upon graduation—but few can say they left behind a mobile robot. Yet that is the case with the alumni who took part in the New Jersey Autonomous Vehicle (NJAV) project while students at TCNJ.
The NJAV project is a senior engineering project that began in 2004 at TCNJ, in which a team of engineering students creates an autonomous vehicle to compete in the annual Intelligent Ground Vehicle Competition (IGVC), held most years in Michigan. Rather than starting from scratch each year, TCNJ engineering students improve upon the previous team’s vehicle.
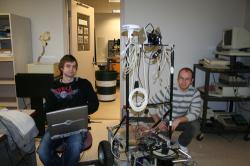
An autonomous vehicle is “a mobile robot which navigates through an environment without any human assistance or remote-control,” explained Graham Apgar ’09, a computer engineering major who is one of the two students working on the project this year.
“The idea of the vehicle is it analyzes the environment in front of it and tries to find a place to go where it won’t run into anything,” Apgar said. The vehicles are similar in concept to those used during search and rescue missions in harsh environments and those used on the moon.
“[The vehicle is] similar to the vehicles they put on the moon, [where the personnel involved] can only talk to the vehicle for a certain amount of time, and then it kind of does its thing for days at a time, navigating with its own internal processor and then giving information back,” Rick Moser ’09, an electrical engineering major who is working on the project with Apgar, said.
The competition requires each team’s vehicle to separately navigate two challenges, one being an obstacle course and the other a navigational challenge in which the vehicle’s GPS must navigate to a certain point.
This year, Apgar and Moser are the only students working on the project, which has provided an extra challenge in the absence of a mechanical engineering student.
Electrical and computer engineering Professor Orlando Hernandez, who advises the NJAV project each year along with mechanical engineering Professor Yunfeng Wang, said, “Some year’s we had a big team of electrical and mechanical engineers and managers, and some years, like this year, we only have two students… so we do less. We use [a] mechanical platform [that already existed] and try to enhance the electronics—that is, make them more robust, more reliable. We then do the same thing at the software level.”
This year, Moser is focusing on the electrical systems and Apgar is handling the vehicle’s software and navigation system.
“Our main goal is to basically make [the vehicle] steer more accurately,” Apgar said, adding that they hope to test the vehicle in similar environments to the competition course as much as possible before the IGVC. “I think the more we can do with that, the better chance we have in the competition.”
Much of the success of the project is driven by support received from alumni of the NJAV project. Last year’s NJAV team, which included Jerry Wallace ’08 and Mike Ziller ’08, was helpful in getting Moser and Apgar familiar with the existing vehicle at the beginning of last semester. The former team is always willing to answer questions, Moser said.
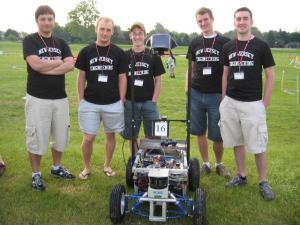
Previous NJAV teams have fared well at IGVC. “Our team brought in over $10,000 in funding, which allowed us to accomplish quite a bit,” Nathan Kupp ’07, who was a part of the 2006-2007 NJAV team, said. That allowed the team to implement new electronics and equipment and do a complete mechanical system design. “Most importantly, we completed these things on schedule, which enabled us to test the car extensively. As a result, we placed eighth in the (IGVC) and left substantial infrastructure to subsequent teams.”
Kupp is pleased that the NJAV project has continued. “We put a ton of work into making the car work, so it’s really cool to see other people build on our effort and get further than we did,” he said. “A project of that scale involves solving lots of random problems that come up, so if the basics have been taken care of, you can quickly get to the more interesting problems, which I think, in the end, makes the difference between an average team and a winning team.”
The NJAV team will compete in the 17th annual IGVC competition at Oakland University in Rochester, Michigan on June 5–8, 2009. For more information about NJAV, visit their Web site at www.tcnj.edu/~njav.
Posted on March 9, 2009